
目 录
一、Tesla FSD V14的发布
二、三大要点:自回归transformer,音频感知,内存优化
三、FSD和Robotaxi 网络的关系
四、总结
2025 年 10 月 7 日深夜(美国时间),特斯拉正式向北美地区搭载 HW4.0 硬件的车主推送 FSD(完全自动驾驶)V14 版本(具体是14.1版本),这场被业内视为 “近一年来最重大的系统升级”,比原计划推迟近一个月 —— 据官方披露,延期原因是发布前发现关键安全漏洞,需通过多轮测试修复。作为特斯拉自动驾驶技术的年度旗舰更新,V14 的发布承载着双重意义:既是对消费者端 FSD 功能的全面强化,更是 Robotaxi 项目技术成果向量产车下放的关键一步。
从推送策略看,特斯拉延续了 “硬件适配优先” 的原则:首批更新仅限搭载 HW4.0 芯片的 Model 3、Model Y 及 Cybertruck 车型,HW3.0 用户需等待后续优化版本 —— 这一安排源于 V14 对计算能力的更高需求,其模型参数量较 V13 提升 4.5 至 10 倍,需更强硬件支撑实时运算。截至发布后 48 小时,北美已有超 2 万名用户收到推送,实测反馈集中在自动泊车流畅度、复杂路口决策等场景的显著提升,有车主评价 “泊车精度优于人工操作”,但也存在挡风玻璃污渍提示机制被调侃 “推卸责任” 等争议。

图 FSD V14自动离开地下车库,图片来自网络
从网络资料看,没有大张旗鼓的发布会,就是直接推送,“润物细无声”。
值得注意的是,特斯拉在更新说明中反复强调 “FSD 仍属 Supervised 模式”:驾驶员需全程保持注意力,系统默认关闭 “刹车确认” 功能,仅提供手动启用选项。这一表述与马斯克此前 “无人监督驾驶即将实现” 的宣传还是有一点落差的,表现出技术理想与安全现实的平衡。所以说即便 V14 实现很多突破,至少目前并不等于真正意义上的 L4 级自动驾驶。
作为业界大事,FSD V14发布自然已经有很多长篇报道,但本文本着“少就是多,less is more”的原则,聚焦其三大要点如下:
自回归 Transformer 是 FSD V14 最核心的技术革新,它彻底改变了系统处理环境信息的底层逻辑。传统自动驾驶系统仅能基于当前帧数据 “被动响应” 路况,而 V14 通过这一技术实现了 “主动预测”—— 如同人类写句子时根据前文推断下文,系统可分析连续摄像头图像序列,结合历史数据预判道路参与者的未来行为。这种预测背后的第一性原理当然是人类的一个基本认知---物质世界是连续的,是渐变的,所以可以根据前面数据预测后面数据。
所谓自回归self-regression,做大数据和AI算法的同仁们一眼就知道一定和某种时间序列相关,自回归是参考自己来时路的意思,一般是越近权重越大,越远权重越小。
所以自回归transformer的技术原理可拆解为两层:“自回归” 特性确保系统按时间顺序处理数据,每一步决策都依赖前序信息积累。例如在十字路口,系统会跟踪行人的步态变化、身体转向等连续信号,而非孤立分析单帧图像;“Transformer” 的注意力机制则负责筛选关键信息,比如判断车辆转向灯状态比车身颜色更重要,优先聚焦影响决策的核心要素。这种组合让 FSD V14 具备了 “类人直觉”:据报道在实测中,面对横穿马路的行人,系统能提前 1.2 秒预判其折返意图并减速,较 V13 的响应速度提升 40%;在无保护左转场景,对向车辆 “抢行概率” 的预测准确率突破 92%。
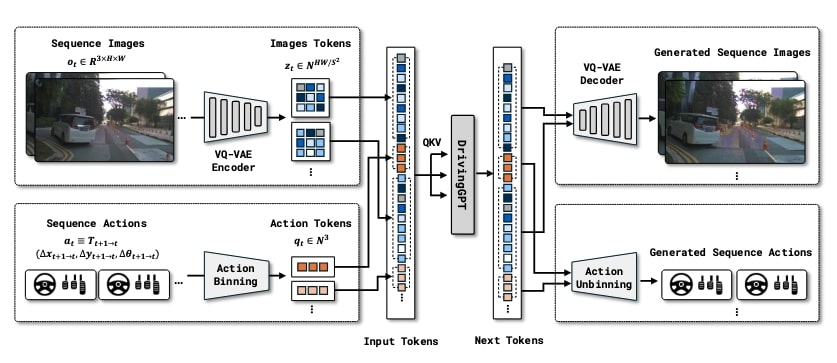
图 自回归总是和连续序列联系在一起,来自网络
特斯拉自动驾驶总监 Ashok Elluswamy 在内部邮件中透露,该模型整合了奥斯汀 Robotaxi 测试积累的 1200 万小时路测数据,通过仿真场景强化训练,已能覆盖施工区域、临时封路等 80% 的非常规路况。这意味着 FSD 不再局限于 “识别已知场景”,而是开始具备 “理解未知场景” 的某种程度的泛化能力。
FSD V14 首次将音频感知纳入核心感知体系,与视觉、雷达形成 “三位一体” 的多模态融合架构,解决了纯视觉方案在复杂环境下的局限性。系统通过车顶嵌入式麦克风阵列采集环境声音,经 VocalCore 3.0 算法处理,在 90dB 噪音(约等于高速行驶时的车内噪音)环境下仍能保持 98.2% 的识别准确率。
其核心应用集中在两大场景:一是紧急车辆识别,当检测到救护车、消防车的警笛声时,系统可结合声音方位、强度变化判断车辆行驶方向,即便视觉被货车遮挡,仍能提前 200 米启动减速靠边程序,较纯视觉方案的响应距离提升 60%;二是驾驶交互优化,驾驶员可通过语音指令切换 “速度模式”“停车偏好” 等设置,无需手动操作中控屏,指令识别延迟控制在 150ms 以内。

图 FSD V14听声辨车,来自网络
不过当前音频感知仍有局限:暂不支持识别行人呼喊(所以不是说V14能听懂人话)、车辆异响等非标准声音信号,且依赖预设的警笛音频模板库,对改装车辆的特殊警笛识别率不足 70%。特斯拉在更新日志中明确,后续版本将通过用户众包数据扩充音频样本库,提升系统的环境适应性。
随着模型规模扩大,FSD V14 面临 “计算延迟” 与 “硬件兼容” 的双重挑战。
V14版本将神经网络模型参数量提升至4.5-10倍(从55万增至5500万),增强数据处理能力和决策精度,使系统在复杂路口、恶劣天气等场景下具备更接近人类的判断力。又将相机帧率从36Hz提升至48Hz,配合视频压缩算法优化,显著提升交通信号、行人动作及车道细节的捕捉能力。就这还想运行在HW4.0甚至HW3.0上。自然会遇到塞不下的问题。
可以说,内存优化是一个被逼的改进。
特斯拉通过三层优化实现突破:首先改进数据缓存机制,对摄像头帧率从 36Hz 提升至 48Hz 产生的高频数据,采用 “增量式键值对缓存”—— 仅更新新帧的特征信息,复用历史计算结果,内存占用降低 35%;其次重构任务调度逻辑,将感知、决策、规划模块的计算资源动态分配,避免单一模块占用过多带宽;最后为 HW5 芯片预留接口,其算力较 HW4.0 提升 40 倍,可支撑未来无监督驾驶模型的部署。
这些优化带来了显著的实际效果:在 HW4.0 硬件上,V14 的平均决策延迟从 V13 的 180ms 降至 95ms,满足高速场景下的实时响应需求;更关键的是实现了 HW3.0 兼容 —— 通过模型压缩技术,老硬件用户虽无法启用全部功能,但核心的紧急避让、自动泊车模块仍能正常运行。特斯拉同步宣布,为已购 FSD 套件的 HW3.0 车主免费升级 HW4.0,预计 2026 年初完成全部更换。
细心的读者可能注意到,每次FSD新版本,都会或多或少提到Robotaxi网络,二者什么关系呢?首先需要说明Robotaxi网络的网络不是指某种神经网络,就是指Robotaxi车群(每一辆叫做Cybercab)互联组成的网络。
图 金黄色的Cybercab,难道马斯克也受了中国文化影响,金色为贵
FSD V14以及以前版本的本质是特斯拉 Robotaxi 技术的 “消费级转译”,有点我们国内说军转民的味道—— 诸多核心功能直接源自奥斯汀 Robotaxi 内测项目的实践积累,这种 “技术反哺” 既加速了量产车体验升级,也为 Robotaxi 网络的商业化铺路。
从技术关联看,V14 的三大功能模块均服务于 Robotaxi 的落地需求:“到达选项” 功能允许用户指定停车场、路边等停车类型,实则是 Robotaxi “乘客上下车点精准定位” 技术的简化版,在奥斯汀测试中,该功能已实现对商场入口、写字楼大堂等场景的厘米级定位;紧急车辆避让机制则来自 Robotaxi 对运营安全性的核心要求 —— 在 10 辆内测车的路测中,该功能成功处理 127 次紧急车辆交汇场景,无一次碰撞风险;而自回归 Transformer 的预测能力,更是 Robotaxi 实现 “无安全员运营” 的基础,目前内测车已能通过该技术预判 85% 的突发路况,远程接管率较去年下降 62%。
特斯拉 Robotaxi 网络的商业化路径已逐渐清晰:2025 年 6 月启动的奥斯汀内测,投入 10 辆 Cybercab 车型,面向内部员工提供短途出行服务,采用 “远程接管 + 安全员随车” 的双重保障模式。V14 的发布则是在消费端验证关键技术 —— 当数百万辆量产车积累的路况数据反哺模型,Robotaxi 的泛化能力将进一步提升。马斯克在内部会议中透露,计划 2026 年将 FSD V14.5 版本部署至 Robotaxi fleet,取消随车安全员,仅保留远程接管团队。
FSD V14 的发布标志着特斯拉自动驾驶技术进入 “从规则驱动到数据驱动” 的一大进步。自回归 Transformer 实现了决策逻辑的 “类人化” 跃迁,音频感知填补了多模态融合的短板,内存优化则解决了技术升级与硬件适配的矛盾 —— 这三大突破共同构建了 “感知更全面、决策更智能、运行更稳定” 的自动驾驶体系,将量产车的自动驾驶体验推向新高度。
V14 虽整合了 Robotaxi 的技术成果,但还没有实现 “无人监督” 的核心目标;虽能处理多数常规场景,却仍需驾驶员应对极端情况;虽在北美市场落地,却因法规、路况差异,难以快速复制到欧洲、中国(国内的朋友要等一等了)等市场。
对于普通用户而言,V14 带来的是更安全和更省力的驾驶辅助体验;对于特斯拉而言,它是 Robotaxi 商业化的 “技术前哨”;对于整个行业而言,它可以算作一个mile stone节点。未来随着 HW5 芯片的量产、无监督学习的突破及监管政策的完善,FSD 与 Robotaxi 将形成更深度的协同,而 V14是其中的一个跳板。
 晋ICP备17002471号-6
晋ICP备17002471号-6

 分享给我的好友
分享给我的好友