
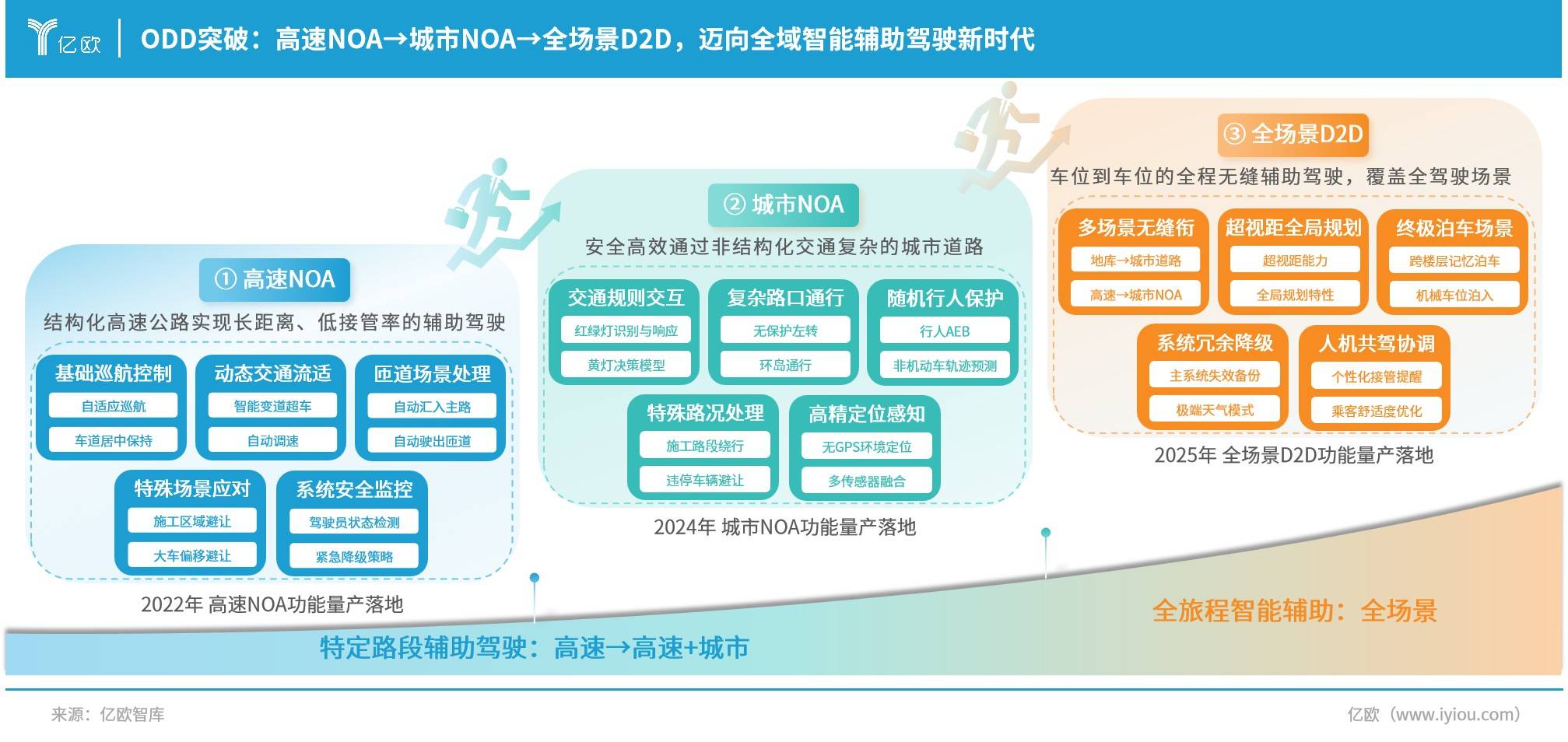
近年来,智能辅助驾驶技术沿着功能迭代与场景拓展的路径持续突破,从2022年高速场景的NOA量产落地,逐步向2024年城市复杂路况的NOA功能延伸,并于2025年实现全场景车位到车位功能的规模化应用,推动智能辅助驾驶从单一场景向全域覆盖升级。
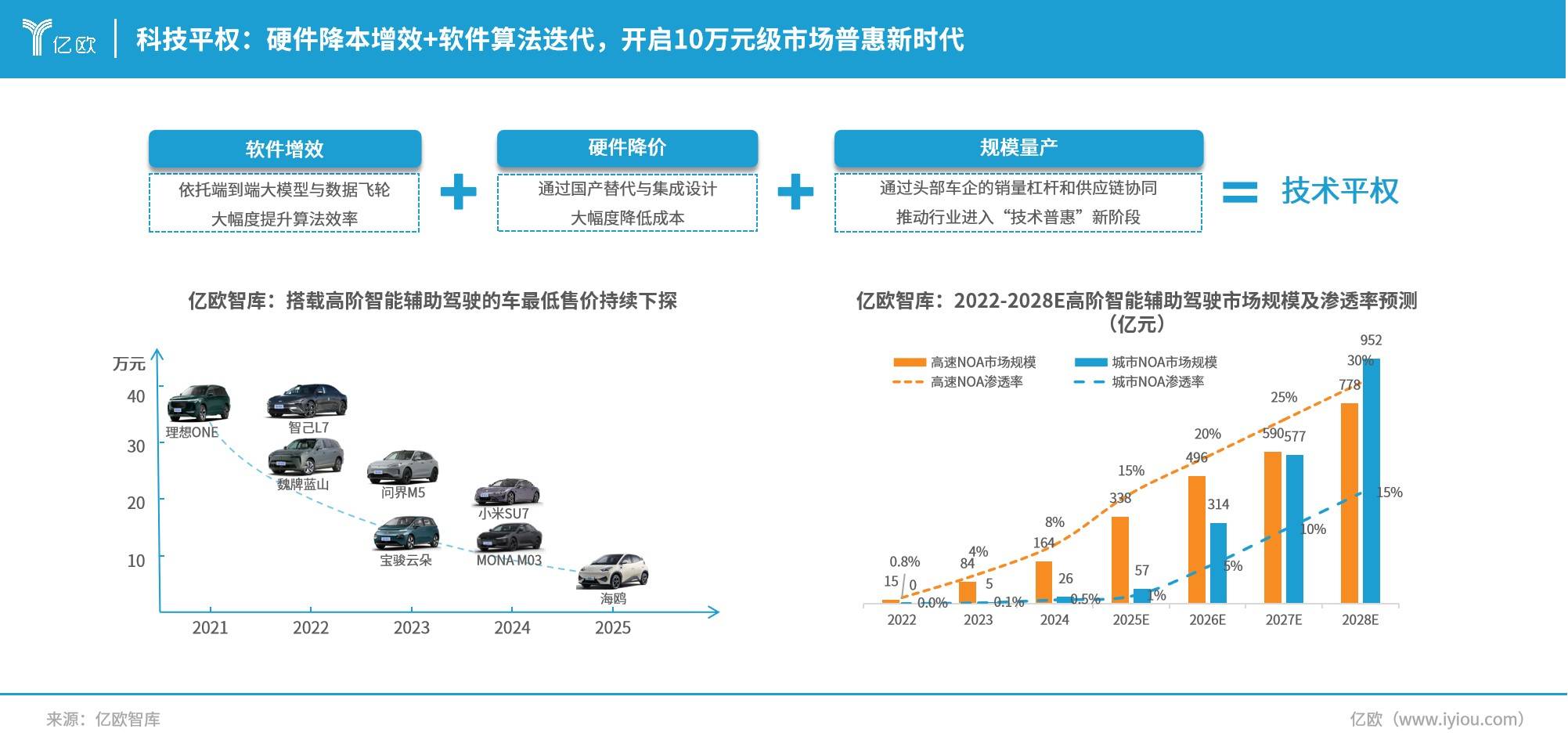
与此同时,硬件方案的降本增效与软件算法的架构革新形成协同效应,推动高阶智能辅助驾驶能力向主流市场加速渗透,并以更低成本的传感器配置和端到端模型优化实现技术普惠,开启10万元级车型的高阶智能辅助驾驶普及新时代。
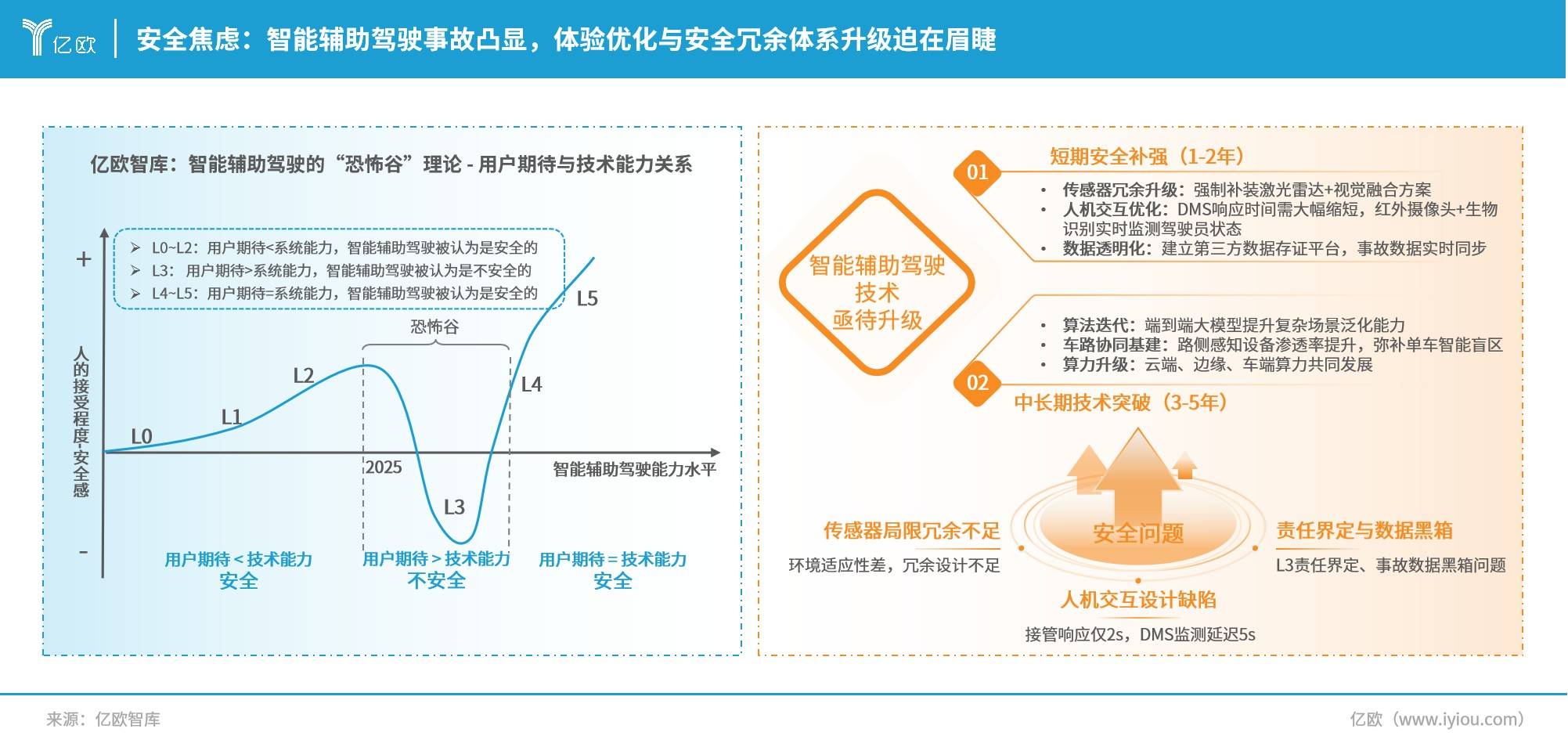
在全场景车位到车位功能快速落地的过程中,用户体验优化与安全冗余体系的构建成为智能辅助驾驶行业焦点。面对复杂场景下的长尾问题,车企通过多模态感知融合、大模型决策算法和动态场景重建等技术强化系统鲁棒性,同时建立从传感器冗余到算力备份的多层级安全保障机制,以应对突发工况并降低人为接管频率。
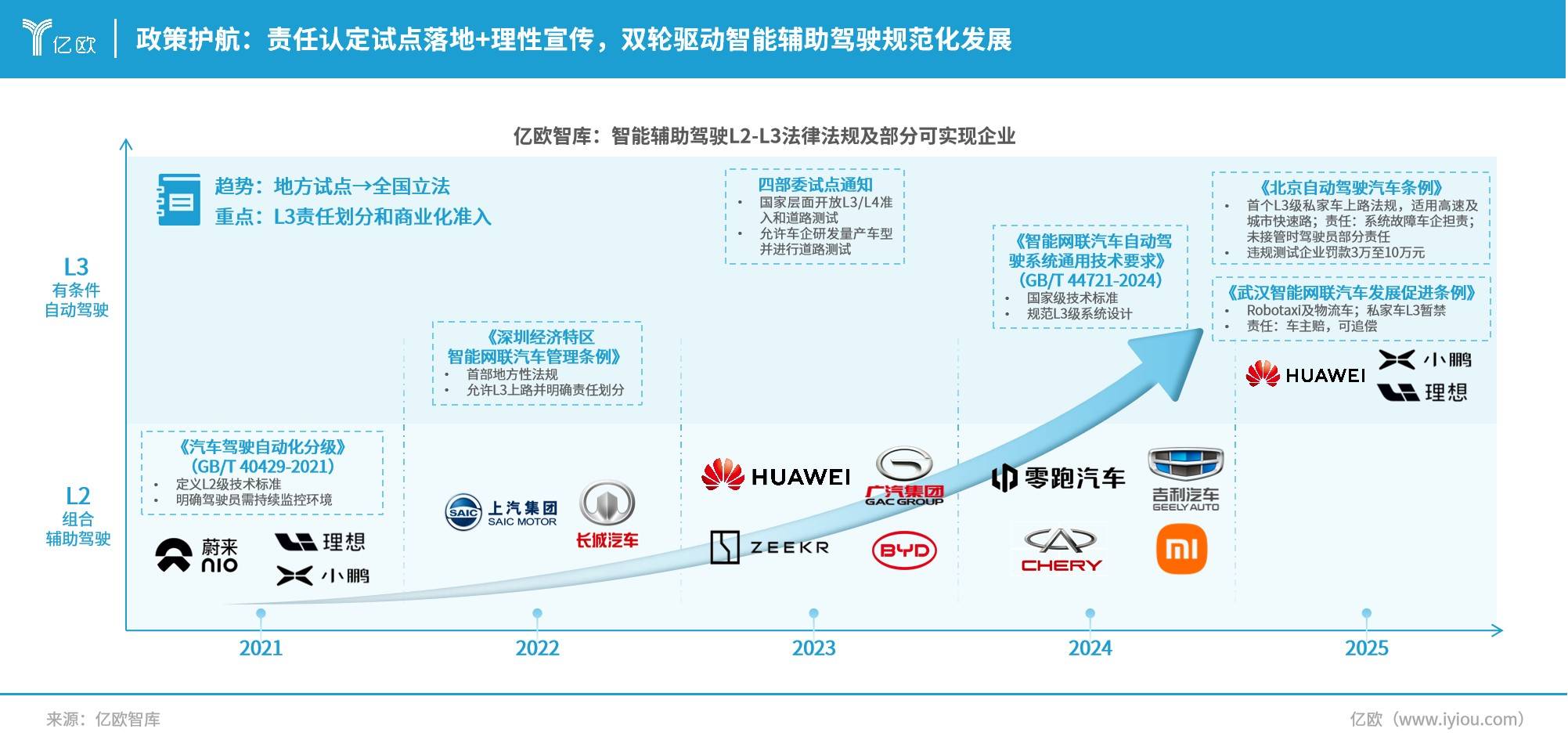
政策层面,L3级有条件自动驾驶责任认定试点方案的推行,为技术商业化厘清了权责边界,而监管部门对过度宣传的规范化约束,则引导行业从功能堆砌转向实效验证,形成技术突破与安全规范的双轨发展格局。
这一系列进展标志着智能辅助驾驶正从技术验证期迈入规模化、规范化发展的新阶段。
中国智能辅助驾驶功能正沿着“场景复杂度逐级攀升、覆盖范围持续扩展”的路径快速发展:从最初高速NOA在结构化道路实现自动变道、匝道通行等基础功能,到城市NOA突破红绿灯识别、无保护左转等城市复杂场景,最终向全场景D2D进化,打通地库—城区—高速的全链路高阶智能辅助驾驶,并融合自动充电、跨楼层泊车等终极场景。
这一进程既反映了技术从“规则驱动”向“数据驱动”的范式升级,也标志着高阶智能辅助驾驶从“特定路段辅助”向“全旅程智能辅助”的价值跃迁。
2025年比亚迪将高速NOA功能下探至8万元车型,小鹏城市NOA覆盖至15万元级市场,其余主流车企也将城市NOA功能下沉至10-20万元车型,高阶智能辅助驾驶的科技平权愈发显露。
高阶智能辅助驾驶科技平权的实现是软件增效、硬件降本、规模扩产三力共振的结果。在科技平权的推动下,L2及L2+高阶智能辅助驾驶的市场规模与渗透率呈现爆发式增长,预计L2+渗透率将从2024年的 8% 跃升至2025年的 15% ,未来乘用车的高阶智能辅助驾驶市场仍将持续高速增长。
今年部分头部车企的智能辅助驾驶NOA功能出现事故,进一步暴露了技术边界与用户认知的错配,引发公众对智能辅助驾驶安全性的信任危机。
2025年4月16日,工信部发布《关于规范智能网联汽车驾驶辅助功能宣传及技术验证的通知》,明确禁止车企夸大智能辅助驾驶能力,强制要求功能验证周期与用户安全教育,为行业近两年过热的宣传进行理性降温。
亿欧汽车研究院认为,当前高阶智能辅助驾驶技术需在算法、数据、算力升级的同时,重点考虑并解决安全短板,推动技术迭代与安全验证的同步发展。
智能辅助驾驶法规逐步完善:
1)地方试点先行,北上深等地已开放L3级有条件自动驾驶测试,深圳2022年率先通过L3立法;
2)全国标准推进,工信部计划2025年完成L3级技术标准,并修订《道路交通安全法》明确责任划分(L3事故车企需部分担责)。
车企技术快速升级:
1)L2→L2+辅助驾驶规模化量产,主流车企高速NOA、城市NOA已规模化落地,并陆续推出全场景D2D;
2)L3蓄势待发,华为等计划2025年推出L3车型,法规落地即可启用(如2025上海车展华为乾崑智驾ADS 4.0正式亮相,并正式发布高速L3商用解决方案)。
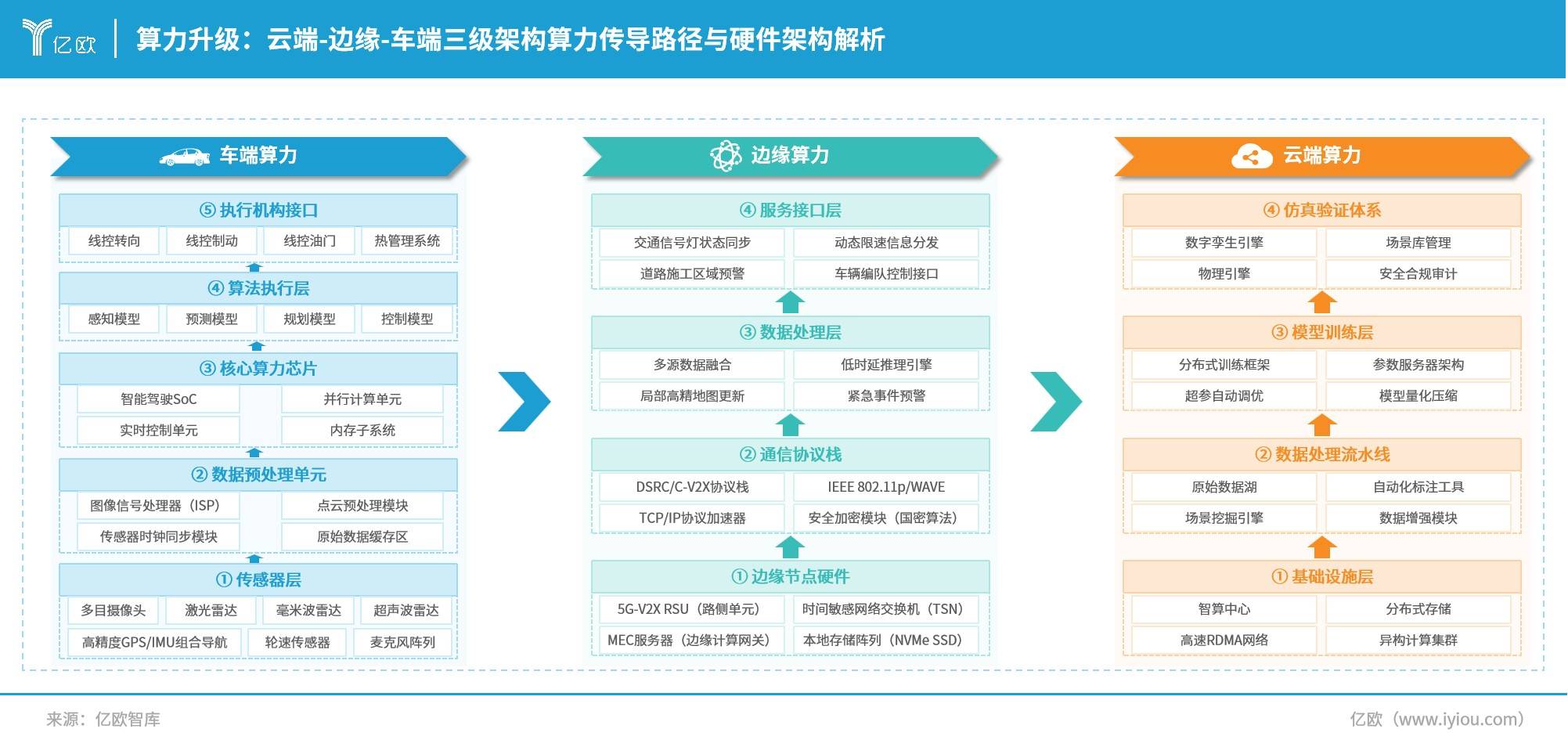
智能辅助驾驶ODD发展经历了“泊车→高速NOA→城区NOA→全场景D2D”的演进路径,其核心驱动力来自算法、数据、算力的协同突破。
算力端形成“云端训练 — 边缘推理 — 车端执行”三级架构,算力能力量级跃升;
数据端真实数据与合成数据双轮驱动,构建全链路数据闭环,突破长尾场景瓶颈;
算法端从“规则驱动+模块堆叠”向“数据驱动+端到端集成”演进,实现感知—决策—控制全链路优化。

智能辅助驾驶数据体系正在从依赖传感器堆叠的硬件冗余模式,转向算法驱动的闭环数据生态,最终通过多模态融合与合成数据突破长尾场景限制。
亿欧汽车研究院认为,目前智能辅助驾驶数据正在加速形成“车端 — 边端 — 云端”全流程数据闭环体系,不能跟上潮流的可能会被逐渐淘汰出局。

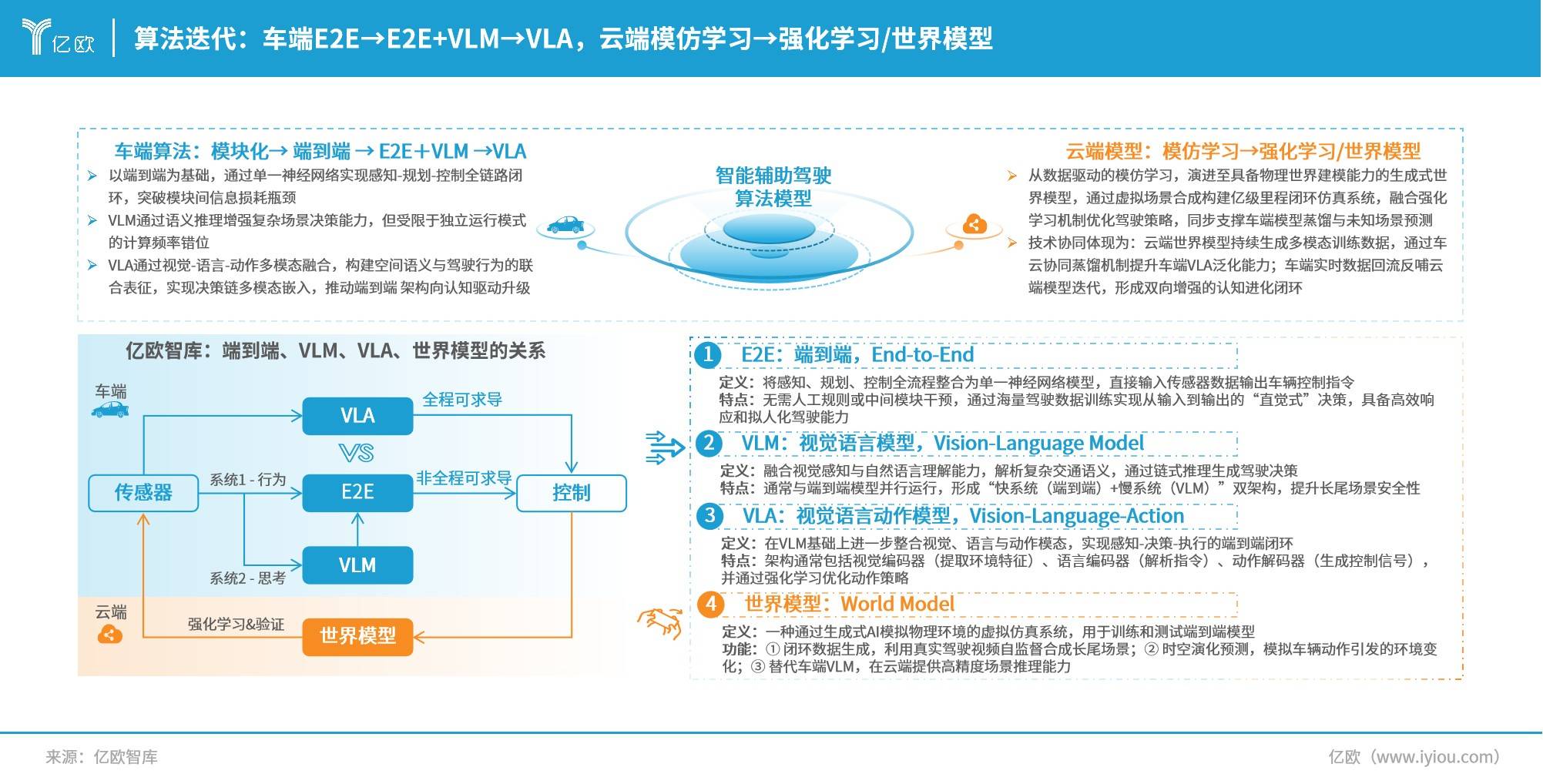
智能辅助驾驶算法中,车端算法的端到端、VLM、VLA及云端模型的模仿学习、强化学习、世界模型形成了递进与协同的技术生态。
车端算法:以端到端架构为基础,通过单一神经网络实现感知 - 规划 - 控制全流程,显著提升驾驶拟人化水平和复杂场景适应性,但其泛化能力受限于数据规模;VLM作为增强模块,通过语义推理辅助E2E处理复杂决策,但其独立运行模式存在算力消耗大、响应频率低的问题;VLA则进一步融合视觉、语言与动作,形成统一模型,将多模态信息直接嵌入驾驶决策链,减少数据依赖并提升泛化能力,被视为端到端2.0的核心形态。
云端模型:从模仿学习演进至生成式世界模型,通过多模态数据合成虚拟场景,构建闭环训练系统以预测未知路况,支撑车端模型泛化能力升级。
2025年全场景D2D功能的规模化落地,以及年底至2026年即将量产上车的L3功能,促使智能辅助驾驶第三方供应商、激光雷达厂商、线控企业、智能辅助驾驶图商、数据标注与仿真企业等愈发成为主机厂提升功能安全的关键生态伙伴;同时全场景D2D功能带来复杂的应用场景,也使智能辅助驾驶芯片供应商更加注重感知算法的业务布局;而解决方案供应商则通过与主机厂多元化的合作模式获得定点,同时不断打造行业口碑,实现可持续的业务增长。
车企对于智能辅助驾驶功能的发力点已经从“上车”向“安全”转移,正在不断优化全场景D2D功能的“长尾”问题,在此过程中车云算力、数据闭环以及算法架构等创新技术的应用,也为产业链上游企业带来机会。亿欧汽车研究院认为随着智能辅助驾驶功能的不断发展,参与企业的市场竞争正在“缩圈”,未来市场集中度也将进一步提升,能够快速响应主机厂需求以及具有AI能力的企业将脱颖而出。
亿欧汽车研究院将持续关注汽车智能化领域如自动驾驶等的最新动态,在调查和研究后产出具有深度和见地的研究成果,以供业界参考与借鉴。同时,我们亦期待与广大读者展开交流与合作,共同为推动智能辅助驾驶产业的持续健康发展贡献力量。
 晋ICP备17002471号-6
晋ICP备17002471号-6

 分享给我的好友
分享给我的好友